













La gamme Aytok Série Hydrofilt RF/CRF, est un groupe de filtres dotés d’un moteur électrique réducteur permettant le mouvement du tuyau collecteur, dont l’évacuation des eaux sales se réalise au moyen de la vanne motorisée. Ce sont des filtres qui peuvent effectuer un lavage à contre-courant entièrement automatique, alimentés en courant alternatif de 220 et 380 Volts. Un capteur ΔP (différence de pression) est utilisé dans l'unité de commande électronique afin de détecter la pollution des particules sales et ainsi démarrer le lavage à contre-courant. L'ouverture de la vanne motorisée dirigée par l'unité de commande entraîne la rotation du moteur réducteur causant le mouvement linéaire du collecteur, ainsi que le nettoyage des particules sales à la surface intérieure du tamis éjectées grâce aux buses. Une fois que le moteur réducteur a terminé son cycle, la vanne motorisée se ferme et le processus est terminé. L'eau sale formée lors de ce processus est automatiquement évacuée lors du lavage à contre-courant.
Caractéristiques Générales
Matériel du corps du filtre: S195T / SS 316L / SS 304 L
Matériel de la cartouche à tamis: SS 304L, PA6GFR30
Pression d’utilisation maximale: 10 Bar (145 PSI)
Pression d’utilisation minimale: 1 Bar (14.5 PSI)
Température de fonctionnement maximale: 60 °C (140 °F)
Lavage à contre-courant: Différence de temps et/ou de pression
Unité de Contrôle: Electronique
Degré de filtration: 20-2000 micron (µ)
Technique de Peinture: einture en poudre électrostatique
Matériel de Peinture: Époxy-Polyester
Spécifications Techniques
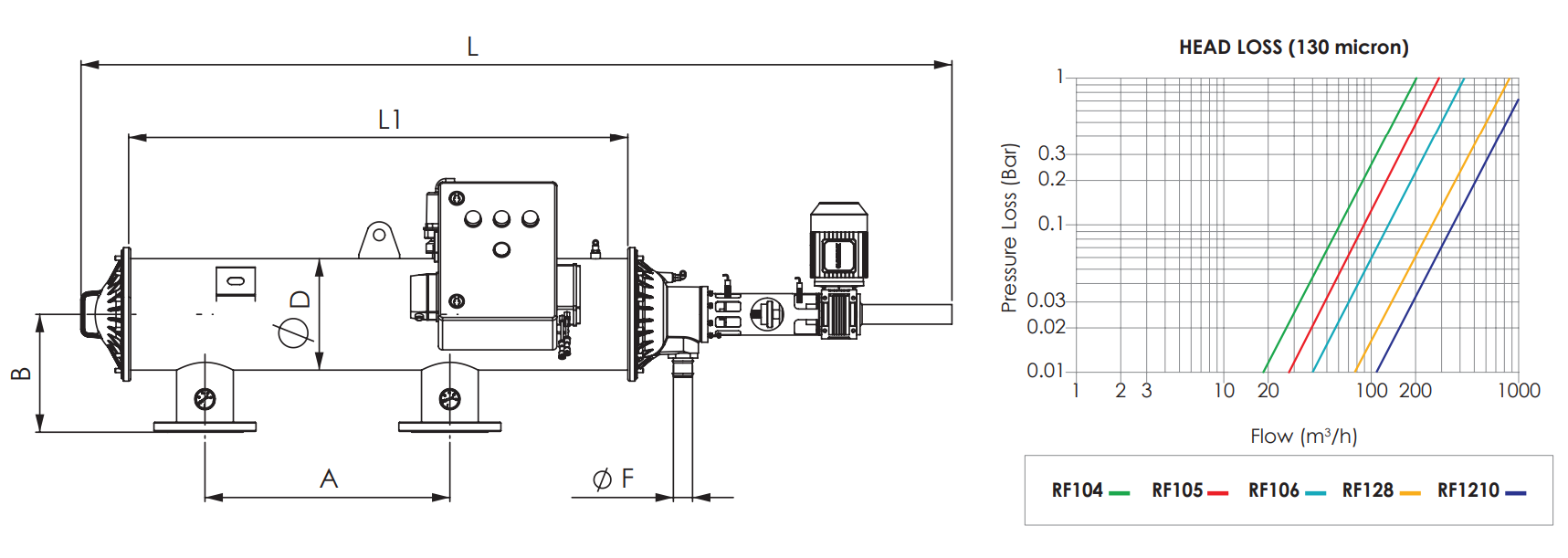
Principe de Fonctionnement
L'eau s’introduit par l’entrée du filtre et s’oriente vers la section du tamis grossier. Les grosses particules présentes dans l'eau sont d’abord pré-filtrées par ce tamis grossier puis l'eau s’écoule vers la section où se trouve la cartouche à tamis. Les particules indésirables dans l'eau forment une couche sale sur la surface interne du tamis lors de la filtration. La couche sale sur la surface du tamis complique le passage de l’eau. Une différence de pression entre l'entrée et la sortie du filtre est alors observée. La valeur de différence est alors détectée par le capteur ΔP et est transmise à l'unité de commande pour démarrer le lavage. Lorsque la différence de pression dans les conduites d'entrée et de sortie du filtre atteint la valeur déterminée dansl'unité de commande, l’unité de contrôle ouvre alorsla vanne motorisée. L'unité de commande démarre le moteur pendant que la vanne motorisée évacue l'eau sale. Le mouvement circulaire du moteur réducteur provoque un mouvement hélicoïdal des buses d'aspiration sur l'ensemble collecteur. La transmission du mouvement est réalisée avec l’arbre de transmission carré. Le mouvement du moteur réducteur est contrôlé par les capteurs optiques. Ainsi, la surface du tamis est complètement balayée et la couche sale est nettoyée. L'absorption de la couche sale est réalisée par les buses au moyen du système qui s'ouvre sur l’atmosphère, créant ainsi un effet de vide dans le filtre. Les particules absorbées traversent le couvercle et l'ensemble collecteur et sont évacuées par la section de décharge. L’ensemble collecteur revient automatiquement à sa position de départ tout en continuant son lavage. La soupape de décharge est fermée et le processus de nettoyage est ainsi terminé. Le processus de filtration continue durant le lavage à contre-courant.